

ビンピッキング自動化がついに実現?




過去50年近くで最も低い失業率を記録する今日、ビンピッキング自動化は緊急の課題です。アメリカでは製造業に携わる労働者の38%が部品箱と製造機械との間で部品移動を行っていますが、今なお求人50万件で人員確保ができていません。自動化産業はこのニーズを満たすべく努力を重ねています。自動化の見本市にはビンピッキングという難題を解決したという企業が毎回新たに数社参加してきます。例えばミュンヘンで開催された見本市2018 Automaticaではビンピッキングの実演が少なくとも14件はありました。しかし大手メーカーでもビンピッキングのステーションの数は少なく、中小企業となるとその数はほぼゼロでした。なぜ導入率がこんなに低いのでしょうか。ニーズはこんなにも高くソリューションがあるというベンダーもこんなに多いというのに。
複雑な問題
答えは単純です。多くの場合ビンピッキング自動化という課題は部分的に解決されているにすぎないからです。バラバラに置かれた部品を部品箱から取り出し機械に正確に配置するという作業は人間にとっては単純な仕事ですが、ロボットには荷が重い作業です。ロボットは部品箱のすみまで(アームを)伸ばしてあちこちに向いた部品をしっかり掴み、同時に部品箱や他の部品、ワークセル自体との衝突も避けなければなりません。
現状ではビンピッキングが完全に自動化されているのは、複数の先端技術を同時に必要とする巨大なシステム統合プロジェクトだけです。その技術とは例えば
・部品、部品箱、ロボットエンドエフェクター、配置ターゲット、周囲の障害物の3Dモデル
・部品をエンドエフェクターでつまみ上げ、配置ターゲットに置く方法が1つ以上のモデル
・部品箱をマッピングするための3Dセンサー
・部品箱の中でそれぞれの部品および障害となりうるものの位置を特定するための画像分析ソフトウェア
・部品のピックアップ地点と配置ターゲットまでの、衝突しないで済む経路を見つけるための経路計画ソフトウェア
・経路上でロボット、エンドエフェクター、部品を操作するロボット制御ソフトウェア
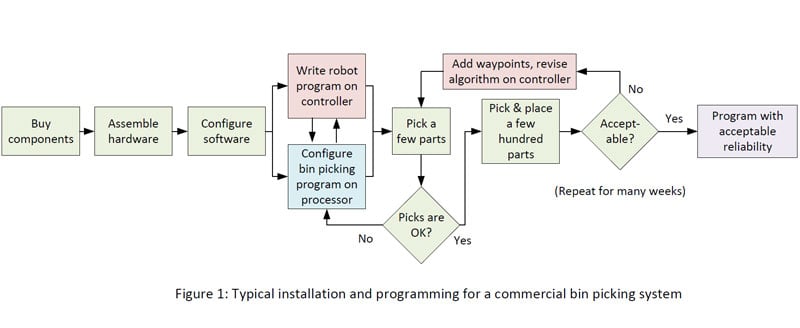
こうした機能の一部を備えた、ビンピッキングの一部解決に役立つ商業用ビンピッキングシステムは存在します。通常こうしたシステムには複数のコンピューター上で動かす画像分析ソフトを搭載し3Dセンサーが使われています。ロボット工学の専門家がそうしたセンサーとそれぞれのコンピューター、ソフトウェア、ロボットのコントローラーを統合し、その上で各部品の位置を把握し配置ターゲットまでどのように運ぶかというプログラムを作ります。部品の向きがてんでバラバラな場合の総合的な経路計画アルゴリズムの作成は、ほぼ不可能な作業と言えるでしょう。よくても実験と調整に数週間、数ヶ月がかかり、できあがった特殊なアルゴリズムのパフォーマンスの信頼性はさほど高くないでしょう(図1参照)。
和訳:
Buy components 部品を購入
Assemble hardware ハードウェアを組立て
Configure software ソフトウェアを作成
Write robot program on controller コントローラーでロボットプログラムを書く
Configure bin picking program on processor プロセッサーでビンピッキングプログラムを設定
pick a few parts いくつか部品をピッキングする
picks are OK? ピッキングができたか?
Add waypoints, revise algorithm on controller コントローラーで通過点を追加しアルゴリズムを調整
pick &place a few hundred parts 部品を数百個ピックアンドプレースする
acceptable? 許容範囲か?
(repeat for many week) (数週間これを繰り返す)
Program with acceptable reliability 許容範囲内の信頼性のプログラム
図1:商業用ビンピッキングシステムの設置・プログラミングの一般的な例(提供:Energid)
ビンピッキングはとても複雑なため、これまでには深層学習技術を適用した例もありました。その結果は今のところ、少なくとも産業用としては、残念なものでした。AIは画像分類や音声認識など精度が比較的低くても許容される用途には大変有用です。しかしAIは、製造業で人間の作業員に取って代わりビンピッキングをするほどの信頼性も精度も持ち合わせていないのです。
小規模メーカーのニーズを満たす
大規模な統合やプログラミングが必要となれば、実際にビンピッキングが採用されるのは自動車OEMのような大手で先進的なメーカーになるのも無理はありません。しかし部品箱や製造機械の大半が存在するのは中小企業です(全世界の産業労働人口のうち69%に相当します)。中小企業こそが最も深刻な人手不足に見舞われているにもかかわらず、ビンピッキングシステム構築に必要な資本や専門知識が最も不足しているのです。
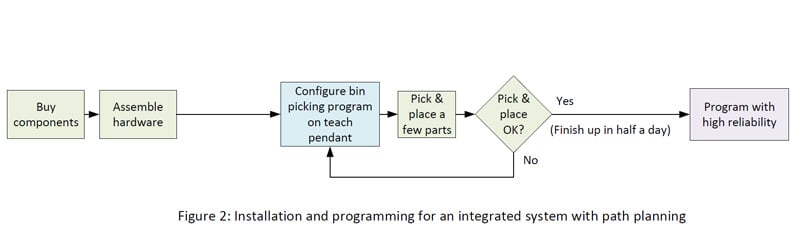
Buy components 部品を購入
Assemble hardware ハードウェアを組立て
Configure bin picking program on teach pendant ティーチペンダントでビンピッキングプログラムを設定
Pick &place a few parts いくつか部品をピックアンドプレースする
Pick & place OK? ピックアンドプレースができたか?
(Finish up in half a day) (半日で完成)
Program with high reliability 信頼性の高いプログラム
図2:経路計画を備えた統合システムの設置・プログラミング(提供:Energid)
あらかじめ統合されている、プログラミングの簡単なシステム
今あるワークステーションにも適合ーActinを使った産業用ビンピッキング
Energidの産業用ビンピッキング
真に汎用性の高いビンピッキングソリューションとは、専門家でなくても使えて数時間のうちに完了し、高度な経路計画が可能で、調整の必要性がほぼ皆無、かつ中小企業にとって費用効率の高いものでなくてはなりません。
Energidは完全に事前統合され複雑な作業は基本ソフトウェアが管理してくれるシステムを作り、自動ビンピッキングの民主化を実現しました。システムの構成要素(センサー、画像および経路計画ソフトウェア、コプロセッサー)はあらかじめ設定済みなので、改めて設定することなくロボットコントローラーにつなぐだけで使えます。そのため設置時間がほんの数時間にまで短縮できます。
プログラミングはすべて、UR+プラットフォームを通じUR協働ロボットのティーチペンダントに統合されます。そのためビンピッキングの動作を通常のロボットコマンドと同じプログラミングインターフェースを使って自由に組み合わせることができます。トレーニングに要する時間もわずかです。設定とプログラミングは一連のウィザードを使います。ウィザードでは、例えば部品をどのように手に取り、どこに置き、どんな障害物を避けるか、といった人間の作業員が受けるようなトレーニングを模倣しています。

EnergidのActionは、NASAの宇宙船、石油掘削設備で使われる自律ロボット、外科医療、産業自動化を含むミッションクリティカルな用途でも実績があるソフトウェアです。水面下ではリアルタイムで各部品の経路を自動で計画しパフォーマンスと信頼性を向上させます。ユーザーが通過点を設定したり手動で調整したりする必要はありません(提供:Energid)
経路計画の自動化が使いやすさと信頼性の鍵
部品箱の中の各部品に対し、衝突を回避しながら配置ターゲットに至る個別の経路を計画するという作業はビンピッキングにおいて非常に難しい挑戦であり、多くの場合自動化専門家の独創性に大きく左右されます。経路計画はシステムの信頼性を左右する主要な要素で、これがうまくできていないと衝突したり、部品が部品箱に残ってしまったり、落下したり、ターゲットから外れたりといったことが起こります。
Energidのビンピッキングソリューションは知性を備えた経路計画・動作制御ソフトウェアActinを活用しています。ActinはNASAの宇宙船、石油掘削設備で使われる自律ロボット、外科医療、産業自動化といったミッションクリティカルな用途で能力が実証されています。水面下ではリアルタイムで各部品の経路を自動で計画しパフォーマンスと信頼性を向上させます。ユーザーが通過点を設定したり手動で調整したりする必要はありません。
中小企業のためのビンピッキングソリューションがついに実現
これでビンピッキング問題は完全に解決され、手動でのマシンテンディングは過去の物になったと宣言できるでしょうか。なかなかそうとも言い切れません。自動化するには複雑すぎる作業は必ずあるもので、しばらくの間は人間のオペレーターが必要でしょう。しかし、費用対効果の高い協働ロボットや3Dイメージング、知性を備えた動作制御ソフトが発展し揃ったことで新世代のビンピッキングソリューションが生まれ、今あるマシンテンディング作業の多くを実行できるようになりました。メーカーは限りある資源をより価値の高い作業に割り当てることができるようになりました。さらに大事なのは、ビンピッキングが中小企業にとって手の届く、費用対効果の高いものになったということです。ついに誰もがビンピッキングソリューションが利用できるようになりました。
Eric Truebenbach

コメント