

G 코드를 이용한 간단한 로봇 프로그래밍




많은 고객들이 우리의 협동로봇을 사용하여 디스펜스, 접착, 디버링, 연마, 재봉 등과 같은 프로세스 응용 프로그램을 자동화하는 데 큰 관심을 표명했습니다. 먼저 Polyscope 5.4에 원격 TCP (tool center point) 특징을 추가하여 로봇이 고정 (원격) TCP에 대해 일정한 속도로 움직일 수있게합니다. 이제 우리는 Polyscope 5.6에서 더욱 흥미로운 기능인 G 코드 툴 패스 지원을 발표하고 있습니다.
이전에 로봇을 사용해 본 사람에게는 티치 펜던트에서 웨이 포인트와 원 이동을 사용하여 로봇 모션을 프로그래밍하는 것이 기본 지식입니다. 이 접근 방식은 머신 텐딩, 팔레 타이 징 또는 일반적인 픽앤 플레이스와 같은 일반적인 코봇 애플리케이션에 완벽하게 적용됩니다. 그러나 로봇이 복잡한 궤적을 따라야하는 프로세스 애플리케이션에는 적합하지 않습니다. 자동차 엔진 블록 위에 액체 개스킷을 분배하도록 로봇을 프로그래밍해야한다고 상상해보십시오. 로봇이 엔진 개요를 추적하는 데 필요한 모든 웨이 포인트 교육을 마치는 데 얼마나 걸립니까? 몇 시간 또는 하루나 이틀 정도일까요?
프랑스 기계 공장 인 BWIndustrie는 Universal Robots의 새로운 UR16e를 설치하여 디버링 작업을 최적화하고 자동화했습니다. 이 회사는 연간 300 ~ 300,000 개의 부품을 생산하며 공정의 반복성을 보장하고자했습니다. 이러한 문제를 해결하고 디버링 작업을 최적화하기 위해 BWIndustrie는 전체 디버링 작업을 처리하기 위해 UR16e를 배포했습니다. 프로그래밍은 TCP 원격 기능을 통해 운영자가 원격으로 수행합니다.
이 과제를 해결하는 한 가지 방법은 로봇 오프라인 프로그래밍 (OLP)입니다. 먼저 OLP 소프트웨어에서 가상 작업 셀을 만듭니다. 그런 다음 로봇 동작을 프로그래밍하고 시뮬레이션하십시오. 마지막으로 소프트웨어는 로봇에 직접로드 할 수있는 프로그램 파일을 출력합니다. 일부 고객에게는이 방법이 허용 될 수 있습니다. 그러나 OLP 소프트웨어에 대한 예산이 없거나이를 배우고 사용할 수있는 적절한 사람이 없다면 어떻게해야합니까? 대안이 있습니까? 시장에 나와있는 많은 솔루션을 검토 한 결과 기본 웨이 포인트 프로그래밍과 OLP 사이에 차이가 있다고 결론을 내 렸습니다. 따라서 우리는이 새로운 기능인 G 코드 툴 패스 지원을 출시하기로 결정했습니다.
G 코드는 CNC 가공에 사용되는 산업 표준 언어입니다. CNC 기계의 모터에 이동 위치, 이동 속도 및 따라야 할 경로를 알려줍니다. 로봇은 각 조인트가 모터에 의해 구동되므로 기본적으로 CNC 기계와 유사합니다. 우리는 단지 G- 코드를 해석하고 그에 따라 로봇 명령을 생성 할 수있는 방법을 찾아야합니다. 이는 우리의 스마트 개발 팀에게 매우 적합했습니다. CAD / CAM 소프트웨어가 널리 지원하기 때문에 G 코드를 구체적으로 선택했습니다. CAD / CAM 패키지를 이미 사용하고 있다면 추가 소프트웨어를 구매하거나 배울 필요가 없습니다. DXF와 같은 다른 형식은 경로의 형상을 정의 할 수 있지만 일반적으로 로봇 프로그래밍에 필요한 도구 방향, 속도 및 가속도와 같은 모든 정보를 포함하지는 않습니다.
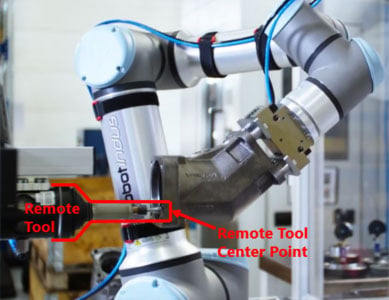
원격 공구 센터 포인트 (RTCP)를 통해 로봇은 공작물을 유지하면서 공작물을 이동할 수 있습니다.
일정한 속도로 고정 공구와 접촉하십시오.
워크 플로는 어떻게 생겼습니까? 먼저 CAD / CAM 소프트웨어에서 공작물의 CAD 모델을 기반으로 G 코드 공구 경로를 정의합니다. 둘째, USB 드라이브를 통해 G 코드 도구 경로를 Polyscope로 가져옵니다. 셋째, 공구 경로의 참조 프레임 인 부품 좌표계를 구성하여 로봇에 공구 경로가있는 위치를 알려줍니다. 이제 로봇이 프로그램에서 공구 경로를 실행할 준비가되었습니다. 도구 경로가 생성되면 일반적으로 사용자가 Polyscope에서 프로그램을 만드는 데 30 분도 걸리지 않습니다. 로봇 프로그래밍 시간이 대폭 단축되었습니다!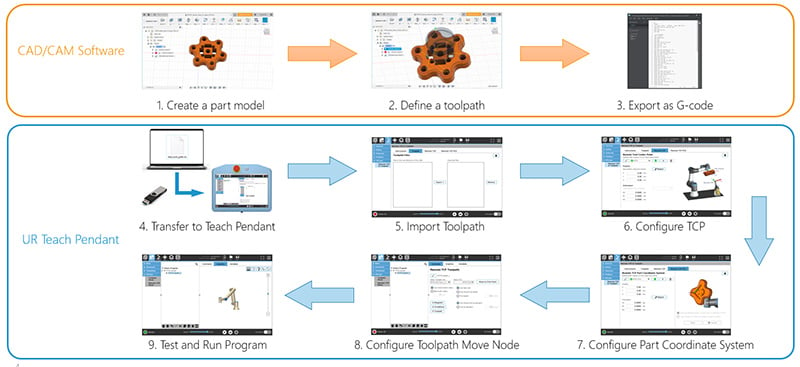
다음은 Fancort UR+ Dispensing Kit를 이용하여 만든 디스펜스 데모입니다.
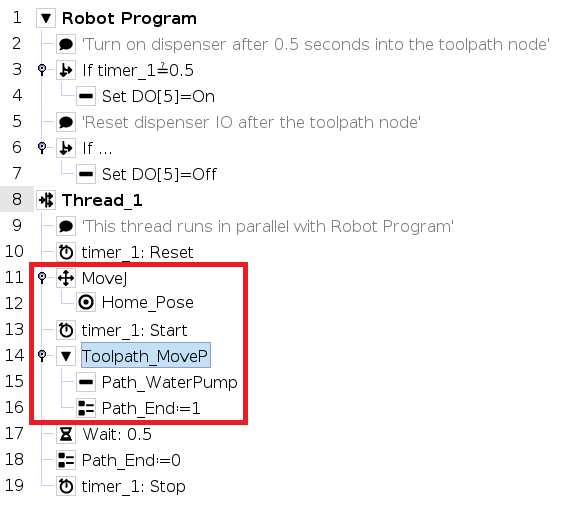
로봇은이 복잡한 궤적을 일정한 속도로 추적하여 공작물에 겔을 고르게 분배 할 수 있습니다. Polyscope의 프로그램 트리도 매우 간결합니다. 더 이상 긴 웨이 포인트 및 원 이동 목록을 프로그래밍하지 않아도 됩니다.
이 새로운 G 코드 도구 경로 기능은 원격 TCP와 함께 Polyscope 5.6의 원격 TCP 및 도구 경로 URCap에서 사용할 수 있습니다. 원격 TCP 또는 일반 TCP를 기준으로 공구 경로를 실행할 수 있습니다. 로봇을 여기에 등록하고이 URCap을 활성화하기 전에 활성화하십시오.
Remote TCP & Toolpath URCap 사용법을 배우려면 지원 사이트의 자습서 비디오, 기술 노트 및 샘플 프로그램을 참조하십시오.
Yichao Pan

의견