

자동화된 테스트 작업은 의료 기기 품질 관리를 위한 정밀도와 반복성을 향상시킵니다



정확성, 반복성 및 안전성은 특히 의료, 산업 또는 운송 시스템과 같이 엄격한 품질 요건을 가진 기기들의 제조에 있어 중요한 측면입니다. UR 협동로봇을 이용하면 품질 보증을 위해 이러한 제품을 테스트하는 데 이상적입니다.
높은 효율성으로 일상적인 테스트 작업을 자동화할 수 있는 기능은 여러 가지 이점을 제공합니다. 생산 단계에서 자동화는 사이클 시간을 크게 단축시킬 수 있으며 품질 관리 단계에서는 테스트 배터리의 표준화가 일관되고 신뢰할 수 있는 결과를 보장합니다.
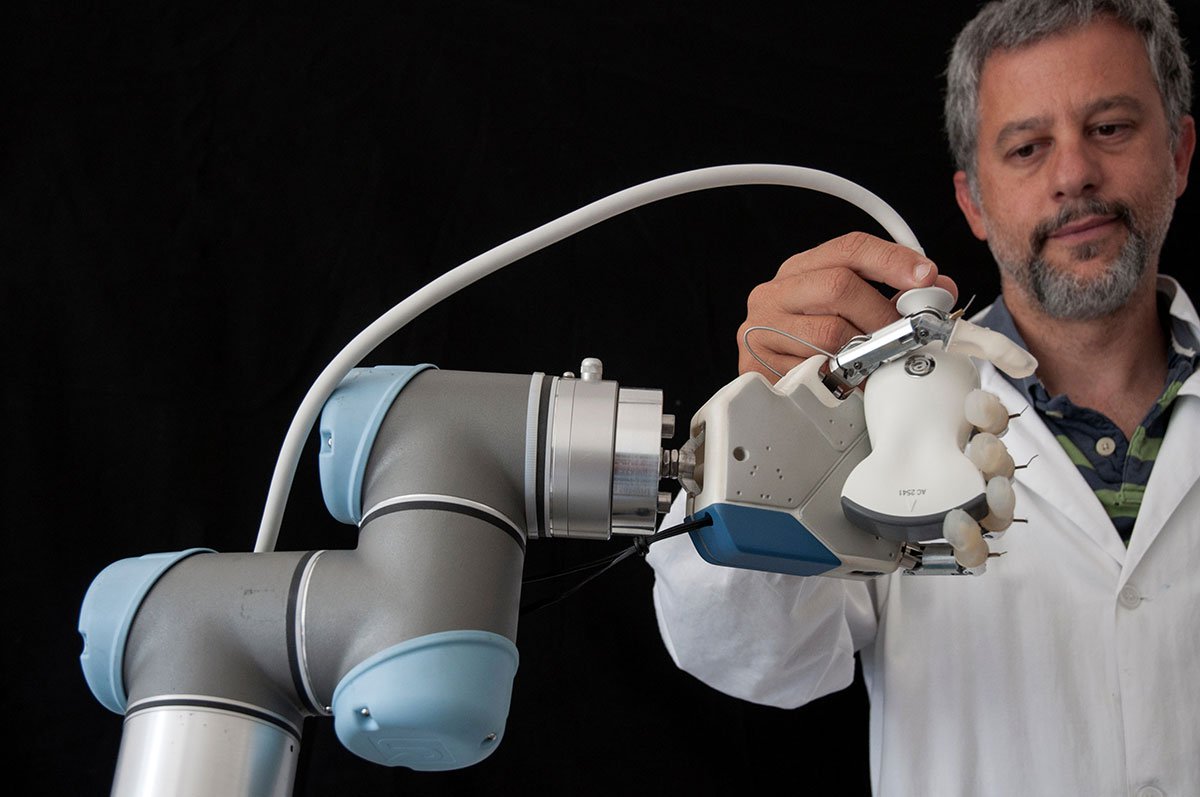
이탈리아 피사에 위치한 SSAS(Sant'Anna Advanced Studies) 바이오 로보틱스 연구소의 한 연구팀이 바로 이 사례에 해당합니다. 이 연구 팀은 초음파 탐지 기능 테스트를 자동화하는 로봇 애플리케이션을 개발했습니다. 이 탐지 설비는 특히 초음파, 전용 자기 공명 및 진단 프로세스 관리 소프트웨어 분야에서 세계 최고의 생체 의학 장비 제조업체 중 하나인 ESAOTE에 의해 생산됩니다.
이 연구팀은 테스트 자동화를 위해 UR5를 선택했습니다. 19kg 미만의 로봇 암에서 5kg의 부하 용량과 850mm의 도달 거리를 갖춘 UR5는 다양한 품질 제어 및 선택 및 배치 작업에 사용할 수 있을 만큼 유연하고 다재다능합니다.
정밀도와 반복성을 향상시키는
테스트 자동화
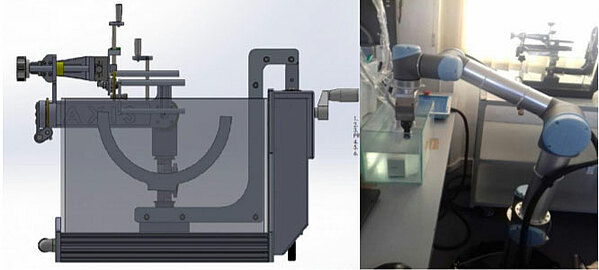
수동식 기계로 설비된 상업용 탐지 설비가 있는 수조 이미지(왼쪽)와 UR+ 파트너 스컹크(Schunk)의 그리퍼가 장착된 UR5 사진(오른쪽)
피사 팀이 개발한 애플리케이션을 통합하기 전에는 전문 기술자가 탐지기의 테스트 배터리를 수동으로 수행했습니다. 이 테스트는 물이 가득 찬 용기에 방출되는 신호를 분석하여 탐지기에 의해 표현되는 정밀도의 정도를 확인합니다. 일반적으로 이러한 종류의 측정에는 물이 사용됩니다. 그 이유는 물의 음향 특성(예: 초음파 속도)이 신체 조직과 일치하기 때문입니다. 이러한 테스트의 경우 탐지기의 정확한 정렬이 중요합니다. 수동 정렬과 로봇 정렬을 통한 세 가지 테스트의 데이터 비교 값에 대한 결과는 의심할 여지가 없습니다. 협동로봇은 보다 정확하고 반복 가능한 데이터를 보장합니다.
개발자는 프로그래밍 단계에서 설정할 수 있는 세 가지 공간 좌표(x, y, z)를 통해 로봇 암의 시작 위치를 기록할 수 있습니다. 이렇게 하면 테스트 설정 속도가 빨라지고 프로세스가 더욱 안정됩니다. 실제로 이 기능은 탐지기의 수동 위치 설정으로부터 불가피하게 야기된 많은 변수들을 제거합니다.
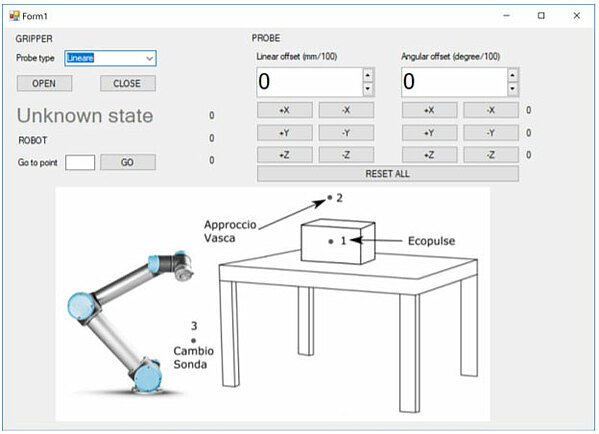
이 로봇은 PC 기반의 소프트웨어를 통해 제어됩니다. 사용자가 테스트할 탐기지 유형을 선택하고, 스컹크 그리퍼를 열고·닫고, 로봇을 서로 다른 테스트 지점에 배치하고, 변환 및 회전 이동의 진폭과 방향을 설정할 수 있습니다. 그래픽 사용자 인터페이스에 표시된 것처럼 소프트웨어는 선형 오프셋에 대해 세 가지 유형의 조정을 수행하고, 각 조정에 대해 다시 세 가지 유형의 조정을 수행할 수 있습니다.
협업 자동화를 통한 로봇 및 숙련 인력의 효과적 활용
협동로봇 어플리케이션이 보장하는 가장 큰 장점은 바로 인적 요소입니다. 기본적으로 협동로봇이 가진 안전 기능 덕분에 로봇 셀 근처에는 ESAOTE 전문 기술자가 상주할 수 있게 됩니다. 로봇과의 공간 공유와 작업자의 경험과 전문성을 고부가가치 작업에 전용할 수 있는 가능성은 협동 UR 로봇공학의 가장 분명한 이점 중 하나입니다. 바이오로보틱스 연구소 어플리케이션 사례의 경우, 전체 실험을 감독하는 전문 기술자의 눈 아래, 탐침의 위치 지정과 같은 반복적인 작업이 로봇 팔에 의해 수행됩니다.
진정한 의미의 협업, 즉 로봇과 인간의 적절한 활용을 통해 상당히 향상된 결과를 얻을 수 있습니다.
자세한 내용은 무료 eBook "협동로봇과 함께 팀이 함께하는 방법"을 다운로드 하시기 바랍니다. - 여기를 클릭하십시오.
Alessio Cocchi E

의견