

優傲機器人編程再簡化




Polyscope 5.6 最新刀具路徑功能解說
許多客戶都曾表示極有興趣使用優傲的協作機器人實現如點膠、塗膠、去毛邊、拋光、縫紉等自動化流程。為了回應客戶的心聲,我們首先在 Polyscope 5.4 新增遠端 TCP 功能 (tool center point),讓機器人對著固定(遠端)TCP定速移動。這次,我們又在 Polyscope 5.6 推出更加精彩的功能,也就是支援G代碼的刀具路徑。
使用過優傲機器人的客戶,應該都知道機器人是由教導器上的途徑點和圓周運動進行動作編程。這種方法十分適合普通的協作機器人應用,譬如機械看照、堆疊或一般取放,但應用在具有複雜軌跡的流程上不甚理想。試想一下,面對汽車引擎墊片的點膠作業編程時,多久才能把引擎外形的所有途徑點教給機器人?也許幾小時?還是長達一兩天?
法國機械工廠 BWIndustrie 裝設了優傲新型機器人 UR16e,為加工零件去毛邊作業實現最佳化和自動化。BWIndustrie 每年生產 300 至 300,000 個系列零件,需要確保流程的可重複性。為了解決這些問題和優化去毛邊工作,該公司引進 UR16e 包辦整個作業,並由操作者透過 TCP 遠端功能進行遠距離編程。
這項挑戰的解決方法之一是離線編程(OLP)。首先在 OLP 軟體上建立虛擬工作單元,接著編程和模擬機器人動作,最後輸出可直接載入機器人的程式檔。對某些客戶來說,此法相對可以接受。但是,假使您沒預算增置 OLP 軟體,或是缺乏學習和使用它的人才,那該怎麼辦?是否有其他選擇?UR檢視市面上種種解決方案後,感覺基本的途徑點編程與 OLP 有一段落差需要補強,因此推出全新的G代碼刀具路徑支援。
G代碼是用於CNC加工的工業標準語言,將移動位置、移動速度與路徑傳達給加工機馬達。而機器手臂也由馬達驅動,運作原理基本上類似 CNC。我們只需設法轉譯G代碼並生成機器人指令,這對優傲的智慧開發團隊來說頗具可行性。之所以選擇G代碼,是因為 CAD/CAM 軟體普遍支援G代碼。如果您已是 CAD/CAM 軟體用戶,那就不必再購買或學習其他軟體。其他像是 DXF 格式也可定義幾何路徑,但通常未包含編程所需一切必要資訊,譬如刀具方向、移動速度和加速度。
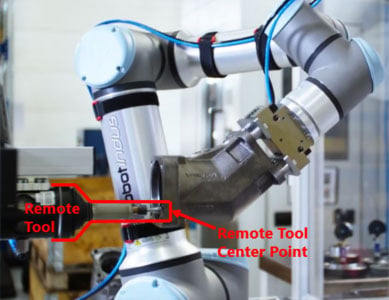
遠端 TCP(遠端刀具中心點,RTCP)讓機器人能一邊以穩定速度接觸固定刀具,一邊移動工件。
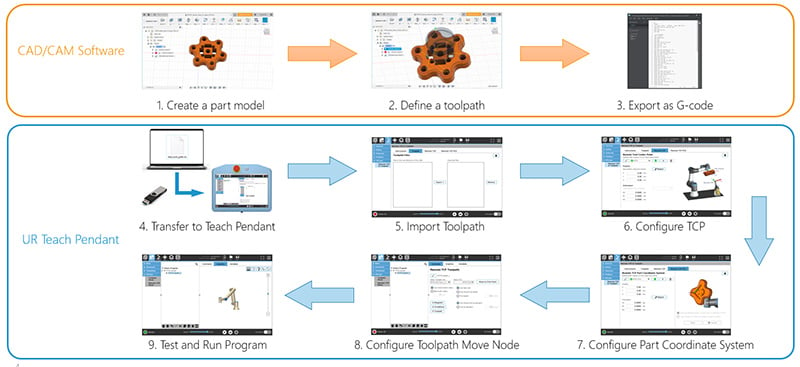
那麼,它的工作流程是什麼模樣呢?第一,CAD/CAM 軟體根據工件 CAD 建模定義G代碼刀具路徑。第二,從隨身碟匯入G代碼刀具路徑至 Polyscope。第三,配置工作座標系統,也就是刀具路徑的基準座標系,使機器人掌握刀具路徑的位置。現在機器人能開始作業了。產生刀具路徑後,用戶通常不用半小時就能在 Polyscope 建立程序,可大幅縮短編程時間!
 這是利用 Fancort UR 點膠組合所做的示範。
這是利用 Fancort UR 點膠組合所做的示範。
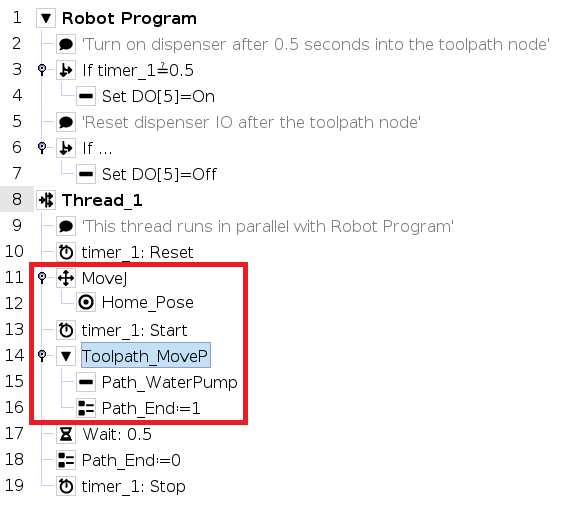
機器手臂能以穩定速度追踪複雜軌跡,對工件均勻點膠。Polyscope 的樹狀結構也很簡潔,不再需要編寫一長串途徑點和圓周運動。
Polyscope 5.6 的 Remote TCP & Toolpath URCap 提供這種新的G代碼刀具路徑功能和遠端 TCP,便於您執行遠端或一般TCP的刀具路徑。使用前,請先確認您的機器人已在此完成登記並啟動 URCap。
欲了解遠端TCP與刀具路徑URCap使用方式,請參見官網支援頁面的教學影片、技術說明書以及程式編寫範例。
Yichao Pan

意見