

工業 5.0 時代的安全與法遵考量



據 IDC 指出,目前的趨勢偏好於投資生產自動化,而非投資於創新的過程,因為生產自動化的優勢更具體,且投資報酬率 (ROI) 更明確。特別是在工資節節高升的國家,企業為了維持競爭力,更積極尋求能在工資居高不下的情況中,讓組織快速獲得生產力的方式。
此外,隨著我們更加接近工業 5.0 的理想 (人機共同在智慧型工廠內作業),對於這種新型態的工作環境,考量其安全及法遵需求的必要性,已成為不可或缺的一環。
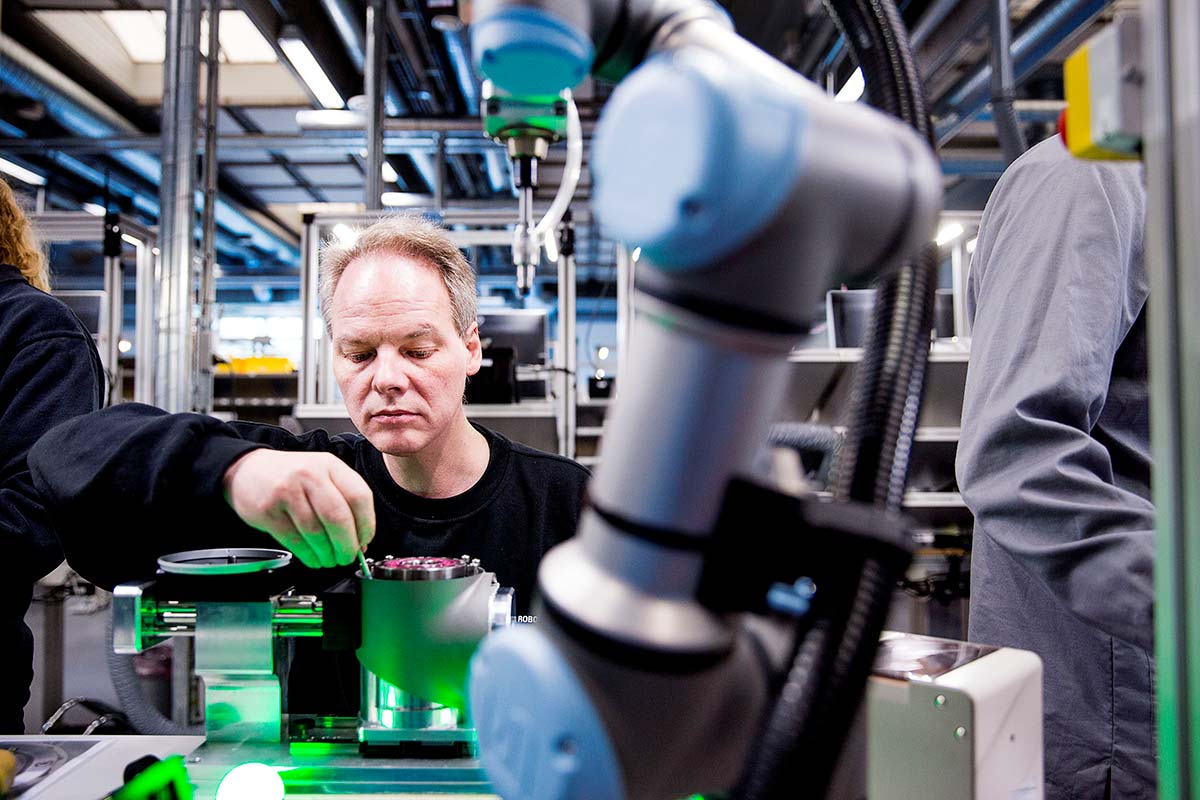
 於加拿大魁北克的 Etalex,一部安全掃描器對操作折床的 UR10 機器人發出警示,要求減速至正常速度的 20%,因為有人員超過了黃線。
於加拿大魁北克的 Etalex,一部安全掃描器對操作折床的 UR10 機器人發出警示,要求減速至正常速度的 20%,因為有人員超過了黃線。
其中有一大部分的原因在於,智慧型工廠的型態異於傳統工廠,其情境為勞工和協作型機器人 (亦稱作 cobot) 近距離作業,而勞工將這些機器人作為多功能的工具使用,例如螺絲起子、包裝或堆棧等。
確保此類工作環境之安全無虞,已變得格外重要,特別是目前有 85% 的製造業者認為在 2020 年時,聯網的勞動力將成為製造業的基本配備。
考量全球生產流程多變性的因素,國際標準化組織 (ISO) 於 2016 年二月公布了協作型機器人系統如何確保勞工安全的全新指引。
ISO/TS 15066 指引的建立,成為了輔助 ISO 10218「工業機器人安全要求」標準的補充文件。 ISO/TS 15066 文件的規範詳盡,目的在於協助機器人工作單元的系統整合業者進行協作型機器人安裝時的風險評估。
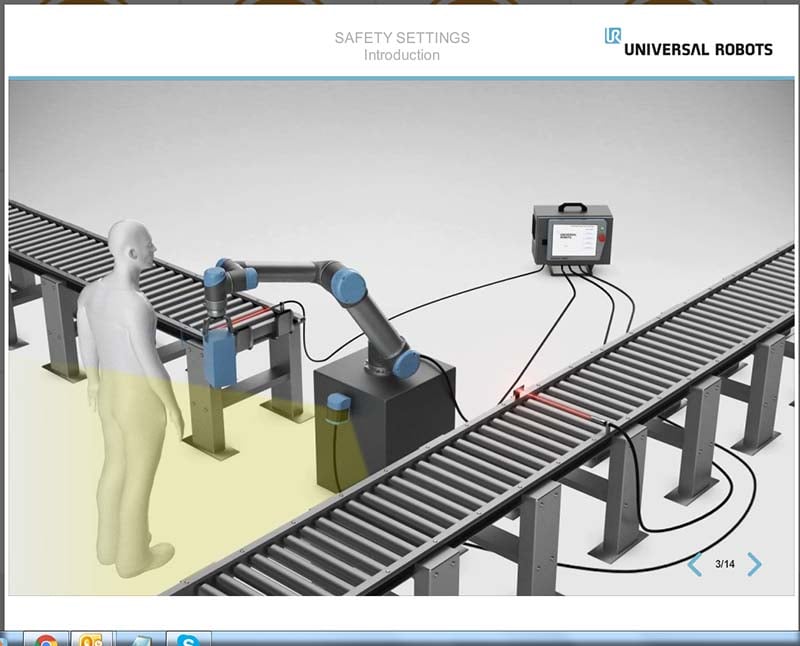 UR 學院提供的免費教育訓練模組內含互動式教學,告訴您如何設定安全區域。點此立刻加入學院
UR 學院提供的免費教育訓練模組內含互動式教學,告訴您如何設定安全區域。點此立刻加入學院
作為協作型機器人的領導品牌之一,優傲科技投資大量時間確保其機器人不只符合法遵標準,更超越這些標準,創造更高的安全性,一如優傲科技的先進技術幫助全球各地的企業提升生產力及流程創新。事實上,優傲科技機器人內嵌之專利安全性系統的先進安全性功能,可讓全球各地已實際安裝運用之上千個應用情境裡,絕大多數機器人無須位於防護籠中即可進行操作 (實際仍須視安全性評估而定)。
 限制力量的安全性系統可讓 UR 機器人若於其路徑上偵測到障礙就自動停止運作 - 如此例中位於挪威的 Nortura 將 UR10 用於堆棧的應用情境。
限制力量的安全性系統可讓 UR 機器人若於其路徑上偵測到障礙就自動停止運作 - 如此例中位於挪威的 Nortura 將 UR10 用於堆棧的應用情境。
優傲科技已取得專利的可調式安全性系統可讓使用者自訂一系列參數,來降低實作工業機器人應用情境時的相關風險。這些參數包括限制機器人的力量、速度、功率或動能,或使用安全邊界來限制其工作區域範圍,以避免人身傷害的風險。具例來說,優傲科技的協作型機器人可在有勞工於近距離作業時減速,將碰觸到勞工的可能性降到最低。
由勞工與機器人在角色上互補的協作型勞動力無疑地帶來廣大商機,從強化製造的生產力、推動創新,到職場安全及整體工作滿意度來說皆然。
雖然目前仍須以傳統方式確保機器人運作的安全性,但也有許多研究正在進行中,探討如何設定實務上的準則,用以確保安全的人機互動,來達到釋放協作型機器人所有潛能的終極目標。而這方面的演化進展,令人非常期待。
想知道協作型機器人如何協助跨越技能的鴻溝嗎?點此下載免費電子書
Esben H. Østergaard

意見